강원지역 주력산업 분야에 투입가능한 혁신인재양성을 위한
강원지능화혁신센터(KICRC)
스마트팜융합바이오시스템공학과 한웅철 교수(8세부 참여) 「AI 기반 드론 정밀 살포 제어 시스템」 개발
작성일 : 2025-06-17 작성자 : 관리자 조회수 : 252
농업생명과학대학 스마트팜융합바이오시스템공학과 한웅철 교수 연구팀이 「AI 기반의 저비용·모듈형 드론 변량 살포 제어 시스템」을 개발했다.
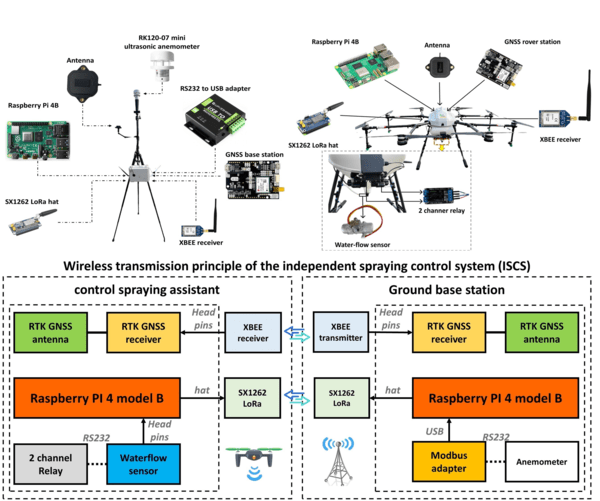
이번 연구는 인공지능(AI) 기술과 드론 살포 기술을 융합해, 자동화된 정밀 살포 제어 플랫폼을 구현한 것으로, 기존 드론 농약 살포 과정에서 발생하는 과다 살포 문제를 효과적으로 해결할 수 있는 기술로 주목받고 있다.
한웅철 교수 연구팀은 Random Forest 모델을 기반으로 살포 균일성을 제어하는 알고리즘을 개발하고, 다양한 센서를 통해 실시간으로 환경 데이터를 수집하여 보다 정밀하고 목표 지향적인 살포 작업을 가능하게 했다.
또한, GPS 좌표 정보를 활용하여 드론의 현재 위치와 목표 구역을 정밀하게 분석하고, 고정밀 지점에 살포가 이뤄지도록 시스템을 설계함으로써, 87.1%에서 최대 98.8%에 달하는 높은 살포 정확도를 기록했다.
이번 기술은 기존 드론의 과잉 살포 문제를 억제하면서도 저비용·모듈형 기반의 확장성과 현장 적용성을 확보한 것으로, 향후 스마트 드론 살포 시스템의 대중화와 농업 현장의 효율성 향상에 크게 기여할 것으로 기대된다.
연구 결과는 ‘Development of an autonomous drone spraying control system based on the coefficient of variation of spray distribution’라는 제목으로 세계적 권위의 농업 공학 분야 학술지 ‘Computers and Electronics in Agriculture’(Impact Factor=7.7, JCR 상위 1%)에 게재됐으며, 한국농촌진흥청의 지원을 받아 수행됐다.
한웅철 교수는 “이번 연구는 기존 드론 기술에 인공지능을 접목해 지능형이면서도 경제적인 자동화 제어 시스템을 개발한 사례”라며 “앞으로도 지속적인 기술 고도화를 통해 스마트농업의 대중화와 지속가능한 농업 실현에 기여하겠다”고 밝혔다.
이번 연구는 인공지능(AI) 기술과 드론 살포 기술을 융합해, 자동화된 정밀 살포 제어 플랫폼을 구현한 것으로, 기존 드론 농약 살포 과정에서 발생하는 과다 살포 문제를 효과적으로 해결할 수 있는 기술로 주목받고 있다.
한웅철 교수 연구팀은 Random Forest 모델을 기반으로 살포 균일성을 제어하는 알고리즘을 개발하고, 다양한 센서를 통해 실시간으로 환경 데이터를 수집하여 보다 정밀하고 목표 지향적인 살포 작업을 가능하게 했다.
또한, GPS 좌표 정보를 활용하여 드론의 현재 위치와 목표 구역을 정밀하게 분석하고, 고정밀 지점에 살포가 이뤄지도록 시스템을 설계함으로써, 87.1%에서 최대 98.8%에 달하는 높은 살포 정확도를 기록했다.
이번 기술은 기존 드론의 과잉 살포 문제를 억제하면서도 저비용·모듈형 기반의 확장성과 현장 적용성을 확보한 것으로, 향후 스마트 드론 살포 시스템의 대중화와 농업 현장의 효율성 향상에 크게 기여할 것으로 기대된다.
연구 결과는 ‘Development of an autonomous drone spraying control system based on the coefficient of variation of spray distribution’라는 제목으로 세계적 권위의 농업 공학 분야 학술지 ‘Computers and Electronics in Agriculture’(Impact Factor=7.7, JCR 상위 1%)에 게재됐으며, 한국농촌진흥청의 지원을 받아 수행됐다.
한웅철 교수는 “이번 연구는 기존 드론 기술에 인공지능을 접목해 지능형이면서도 경제적인 자동화 제어 시스템을 개발한 사례”라며 “앞으로도 지속적인 기술 고도화를 통해 스마트농업의 대중화와 지속가능한 농업 실현에 기여하겠다”고 밝혔다.